Der Nano Motor Controller Air ist ein kompaktes Modul mit Gleichstrom Ausgängen, welches über die Loxone Air Funktechnologie angesteuert wird.
Durch die konfigurierbaren Ausgänge können Motore oder LED Leuchtmittel in den folgenden Betriebsarten angeschlossen werden:
Motor Bidirektional: Ein Ausgang für Gleichstrom Motore samt Steuerung von Laufrichtung und Geschwindigkeit.
Motor Unidirektional: Zwei Ausgänge für Gleichstrom Motore samt Steuerung der Geschwindigkeit, kein Richtungswechsel möglich.
Dimmer: Ein Ausgang zum Dimmen von Niedervolt LED Leuchtmitteln.

Das Schalten und Umpolen der Ausgänge erfolgt durch eine interne H-Brücke, Motorgeschwindigkeit und Dimmung werden durch Pulsweitenmodulation gesteuert.
Datenblatt Nano Motor Controller Air
Inhaltsverzeichnis
- Montage
- Inbetriebnahme
- Betriebsarten
- Hinweise zum Betrieb von Motoren
- Stromgrenzwerte einstellen
- Eingänge, Ausgänge, Eigenschaften
- Sicherheitshinweise
- Dokumente
Montage↑
Installieren Sie das Gerät in einer geeigneten Installationsdose.
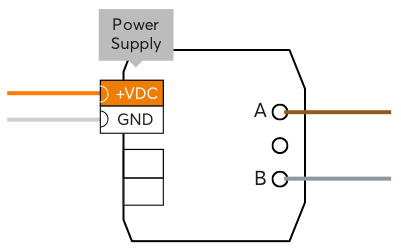
Klemmen Sie die Spannungsversorgung (orange/weiße Schraubklemme) an.
Die Höhe der Versorgungsspannung richtet sich nach der Last, muss aber im Bereich von 9...26VDC liegen.
Die Ausgänge werden je nach gewählter Betriebsart angeschlossen.
Inbetriebnahme↑
Der Lernmodus ist im Auslieferungszustand nach dem Aktivieren der Spannungsversorgung aktiv. Dies wird durch Rot/Grün/Orange wechselndes Leuchten der Status LED angezeigt.
Folgen Sie dann dem Einlernvorgang an der Air Schnittstelle.
Möchten Sie den Lernmodus manuell aktivieren, das Gerät zunächst für 10 Sekunden spannungslos machen, danach wieder einschalten. Kann nun für zwei Minuten keine Verbindung zu einem Miniserver hergestellt werden, wird der Lernmodus für 30 Minuten aktiviert.
Betriebsarten↑
Der Nano Motor Controller unterstützt drei in Loxone Config einstellbare Betriebsarten, die sich in Funktion und beim Anschließen der Ausgänge unterscheiden:
Motor Bidirektional
In dieser Betriebsart steht ein Ausgang für Gleichstrom Motore samt Steuerung von Laufrichtung und Geschwindigkeit zur Verfügung.
Die Laufrichtung kann im Betrieb vom Nano Motor Controller durch Umpolen der Ausgänge umgeschaltet werden:
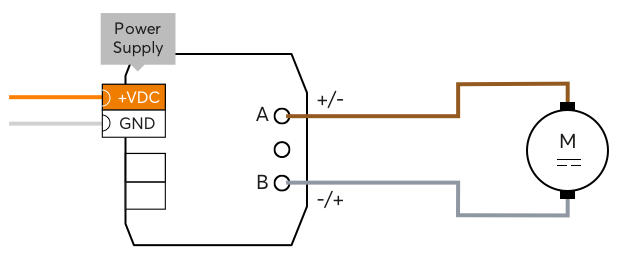
Dies eignet sich für Anwendungen, wo ein Richtungswechsel notwendig ist, beispielsweise für Antriebe von Beschattungen, Vorhängen, oder motorisierten Fenstern.
Motor Unidirektional
In dieser Betriebsart stehen zwei Ausgänge für Gleichstrom Motore samt Steuerung der Geschwindigkeit zur Verfügung, die Ausgänge sind unabhängig voneinander ansteuerbar.
Die Laufrichtung wird beim Anschließen festgelegt:
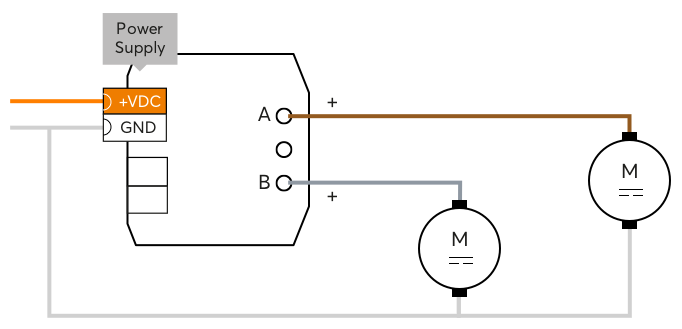
Dies eignet sich für Anwendungen, wo zwei Motore getrennt angesteuert werden sollen.
Dimmer
In dieser Betriebsart steht ein Ausgang zur Dimmung von Niedervolt LED Leuchtmitteln zur Verfügung:
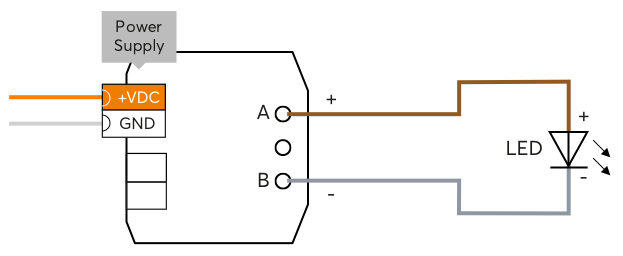
Dies eignet sich für Leuchtmittel wie LED Streifen oder Spots, die mit einer Konstantspannung von z.B. 12V oder 24V betrieben werden, und durch Pulsweitenmodulation (PWM) gedimmt werden können.
Hinweise zum Betrieb von Motoren↑
Die Steuerung der Geschwindigkeit und Laufrichtung von Motoren erfolgt direkt über ihre Versorgungsspannung.
Die Spannung wird an den Ausgängen des Nano Motor Controllers pulsweitenmoduliert, im bidirektionalen Modus zusätzlich auch umgepolt ausgegeben.
Dafür sind vor allem echte Gleichstrom Motore, die über einen Kommutator und Bürsten verfügen, sehr gut geeignet.
Bei Bürstenlosen Gleichstrom Motoren (Brushless DC), ist dem eigentlichen Motor eine Elektronik vorgeschaltet, die eine PWM Steuerung der Geschwindigkeit über die Versorgungsspannung oft unmöglich macht.
Solche Motore können nur Ein- oder Ausgeschaltet werden. Dazu ist als Geschwindigkeit 100% zu wählen, der Wert für die Beschleunigung kann auf Sprung gestellt werden.
Eine Drehrichtungsumkehr ist oft nicht möglich, auch besteht die Gefahr die Elektronik des Motors zu beschädigen, wenn dieser nicht für eine Richtungsumkehr geeignet ist, und keinen Verpolungsschutz besitzt.
Eine Parallelschaltung von Motoren an einem Ausgang ist nur unter Vorbehalt möglich.
Dafür muss sichergestellt sein, dass nur Motore vom gleichen Typ zum Einsatz kommen, und diese gleich belastet sind.
Beim Motoranlauf aber auch beim Auslauf (Bremsen) kann es bei Antrieben mit höherem Trägheitsmoment trotz hohem Überstrom Grenzwert zu einem Auslösen der Überstromabschaltung des Nano Motor Controllers kommen.
Abhilfe kann eine Reduzierung des Werts für Beschleunigung und Bremsen auf z.B. 20%/s schaffen, um einen langsamen An- und Auslauf und damit Reduzierung des Stroms zu erreichen.
Während der ersten Sekunde des Motoranlaufs wird der eingestellte Überstrom Grenzwert ignoriert und liegt fest bei 5A. Ist dies zu kurz, kann der Überstrom Grenzwert auf bis zu 5A erhöht werden, um den Betrieb von Motoren mit längerer Anlaufzeit zu ermöglichen. Der Betrieb von Motoren im Überstrombereich von 2,2 - 5A ist für max. 30 Sekunden erlaubt.
Beim Stoppen des Motors läuft dieser nicht natürlich aus, sondern es entsteht technisch bedingt eine Bremswirkung durch den Nano Motor Controller.
Wenn ein Auslaufen des Motors ohne Bremswirkung erwünscht ist, muss der Wert für das Bremsen auf einen passenden niedrigeren Wert gestellt werden, sodass sich ein vergleichbares Verhalten wie bei natürlichem Auslauf ergibt.
Stromgrenzwerte einstellen↑
In den Eigenschaften des Nano Motor Controllers lässt sich ein Fenster mit einem Diagramm zur Einstellung der Stromgrenzwerte öffnen:

Es wird daraufhin mithilfe der aktuellen Stromaufnahme des Motors ein Diagramm gezeichnet. Durch einen Probelauf des verwendeten Motors bzw. Antriebs können die Grenzwerte für Stromfluss und Überstrom an den Motor bzw. den Antrieb angepasst werden.
Empfehlenswert ist es, die Grenzwerte nicht zu eng zu setzen, falls sich später durch Effekte wie Verschleiß oder Temperatureinfluß die Motorlast und damit der Strom etwas verändert.
Zuletzt werden die Werte durch Speichern des Programms in den Miniserver übernommen.
Sensoren↑
| Kurzbeschreibung | Beschreibung | Wertebereich |
|---|---|---|
| Stromfluss | Eingang wird aktiv, wenn die Stromaufnahme vom Motor über dem eingestellten Grenzwert für Stromfluss liegt (Betriebsart Bidirektional) | 0/1 |
| Überstrom | Eingang wird aktiv, wenn die Stromaufnahme vom Motor über dem eingestellten Grenzwert für Überstrom liegt (Betriebsart Bidirektional) | 0/1 |
| Stromfluss A | Eingang wird aktiv, wenn die Stromaufnahme von Motor A über dem eingestellten Grenzwert für Stromfluss A liegt (Betriebsart Unidirektional) | 0/1 |
| Stromfluss B | Eingang wird aktiv, wenn die Stromaufnahme von Motor B über dem eingestellten Grenzwert für Stromfluss B liegt (Betriebsart Unidirektional) | 0/1 |
| Überstrom A | Eingang wird aktiv, wenn die Stromaufnahme von Motor A über dem eingestellten Grenzwert für Überstrom A liegt (Betriebsart Unidirektional) | 0/1 |
| Überstrom B | Eingang wird aktiv, wenn die Stromaufnahme von Motor B über dem eingestellten Grenzwert für Überstrom B liegt (Betriebsart Unidirektional) | 0/1 |
Aktoren↑
| Kurzbeschreibung | Beschreibung | Einheit | Wertebereich |
|---|---|---|---|
| Rechtslauf | Ausgang aktiviert den Motor Rechtslauf A+/B- (Betriebsart Bidirektional) | - | 0/1 |
| Linkslauf | Ausgang aktiviert den Motor Linkslauf A-/B+ (Betriebsart Bidirektional) | - | 0/1 |
| Start/Stopp A | Ausgang aktiviert den Motor A (Betriebsart Unidirektional) | - | 0/1 |
| Start/Stopp B | Ausgang aktiviert den Motor B (Betriebsart Unidirektional) | - | 0/1 |
| Geschwindigkeit | Ausgang gibt die Geschwindigkeit für den Motor vor (Betriebsart Bidirektional) Wird der Ausgang nicht verwendet, gilt die Standardgeschwindigkeit |
% | 0...100 |
| Geschwindigkeit A | Ausgang gibt die Geschwindigkeit für Motor A vor (Betriebsart Unidirektional) Wird der Ausgang nicht verwendet, gilt die Standardgeschwindigkeit |
% | 0...100 |
| Geschwindigkeit B | Ausgang gibt die Geschwindigkeit für Motor B vor (Betriebsart Unidirektional) Wird der Ausgang nicht verwendet, gilt die Standardgeschwindigkeit |
% | 0...100 |
| Dimmer WW | Standard Aktor mit einem Kanal zur Ansteuerung von Beleuchtung (Betriebsart Dimmer) | % | 0...100 |
| Smartaktor WW | Smart Aktor WW zur Ansteuerung von Beleuchtung, Verwendung an kompatiblen Beleuchtungs Bausteinen (Betriebsart Dimmer) | - | - |
Diagnose-Eingänge↑
| Kurzbeschreibung | Beschreibung | Einheit | Wertebereich |
|---|---|---|---|
| Onlinestatus Nano Motor Controller Air | Gibt an, ob das Gerät für den Miniserver erreichbar ist. Diagnose bei Air Geräten Diagnose bei Tree Geräten Diagnose bei Extensions |
Digital | 0/1 |
| Systemtemperatur | Liefert die interne Gerätetemperatur. Dies ist oft die Temperatur der CPU oder einer anderen Stelle im Gerät. |
° | ∞ |
| Temperaturabschaltung | Eingang ist aktiv, wenn die Ausgänge des Geräts aufgrund zu hoher Gerätetemperatur abgeschaltet wurden. Mögliche Gründe: Zu hohe Umgebungstemperaturen, Überlastung der Ausgänge. | Digital | 0/1 |
Eigenschaften↑
| Kurzbeschreibung | Beschreibung | Einheit | Wertebereich | Standardwert |
|---|---|---|---|---|
| Onlinestatus überwachen | Wenn aktiviert, werden Sie über den Systemstatus oder über den Mailer benachrichtigt, wenn das Gerät nicht mehr erreichbar bzw. offline ist. | - | - | - |
| Repeater Funktion deaktivieren | Repeater Funktion dieses Air-Gerätes deaktivieren. Loxone Air basiert auf der Mesh-Technologie. Jedes Air-Gerät mit fester Spannungsversorgung kann Pakete von anderen Air-Geräten weiterleiten (repeaten) und erweitert somit die Reichweite und Stabilität des Gesamtsystems. In großen Systemen mit sehr vielen Air-Geräten auf engem Raum kann die Kommunikation zwischen den Air-Geräten zu einer sehr hohen Funkkanal-Auslastung führen. Eine zuverlässige Erreichbarkeit der Air-Geräte kann dadurch nicht mehr gewährleistet werden. Das Deaktivieren der Repeater Funktion bei einzelnen Air Geräten kann hier Abhilfe schaffen. Deaktivieren Sie diese Funktion nicht leichtfertig, da dies Auswirkungen auf die Reichweite und Stabilität des Systems haben kann. |
- | - | - |
| Seriennummer | Seriennummer des Air Geräts. Das automatische Einlernen kann auf der Air Base aktiviert werden. Automatic pairing can be enabled on the Airbase for a set time. |
- | - | - |
| Gerätetyp | Air Gerätetyp | - | - | - |
| Betriebsart | Gibt die Betriebsart des Nano Motor Controllers an. Motor Bidirektional: Ein Ausgang für Gleichstrom Motore samt Steuerung von Laufrichtung und Geschwindigkeit. Motor Unidirektional: Zwei Ausgänge für Gleichstrom Motore samt Steuerung der Geschwindigkeit, kein Richtungswechsel möglich. Dimmer: Ein Ausgang zum Dimmen von Niedervolt LED Leuchtmitteln. |
- | - | - |
| Stromgrenzwerte | Konfigurieren Sie die Stromgrenzwerte mit Hilfe eines Diagramms der aktuellen Stromstärke. | - | - | - |
| PWM Frequenz | Frequenz der Pulsweitenmodulation. Dient zur Anpassung an den Motor. So kann beispielsweise unangenehmes Pfeifen beseitigt werden. | Hz | 1000...10000 | 5000 |
| Stromfluss Grenzwert | Ab diesem Wert wird ein Stromfluss erkannt. | mA | 100...5000 | 100 |
| Überstrom Grenzwert | Ab diesem Wert wird Überstrom erkannt, der Ausgang schaltet ab und der Überstromeingang wird aktiv. Während der ersten Sekunde des Motoranlaufs wird die eingestellte Überstromabschaltung ignoriert und liegt fest bei 5A. Der Betrieb von Motoren im Überstrombereich von 2,2 - 5A ist für max. 30 Sekunden erlaubt. (Motoranlauf) Maßgeblich ist der Gesamtstrom. |
mA | 100...5000 | 3500 |
| Beschleunigen | Geschwindigkeit der Veränderung beim Einschalten. Sprung bedeutet, dass der Zielwert sofort gesetzt wird. |
- | - | - |
| Bremsen | Geschwindigkeit der Veränderung beim Bremsen. Sprung bedeutet, dass der Zielwert sofort gesetzt wird. |
- | - | - |
| Standardgeschwindigkeit | Standardgeschwindigkeit, wenn der Geschwindigkeitsausgang nicht verwendet wird. | % | 0...100 | 100 |
Sicherheitshinweise↑
Die Installation muss nach den einschlägigen Vorschriften durch eine Elektrofachkraft erfolgen.
Die Installation erfordert den Einbau in ein geeignetes Gehäuse, um den Schutz vor Berührung, Wasser und Schmutz zu gewährleisten.
Dokumente↑
Datenblatt Nano Motor Controller Air
Temperaturen thermische Abschaltung