El Nano Motor Controller Air es un módulo compacto con salidas de corriente continua, que se controla a través de la tecnología de radio Loxone Air.
Gracias a las salidas configurables, los motores o las lámparas LED se pueden utilizar en los siguientes Modos de funcionamiento estar conectado:
Motor bidireccional: Una salida para motores de corriente continua que incluye control de dirección y velocidad.
Motor unidireccional: Dos salidas para motores de corriente continúa incluyendo control de velocidad, No cambio de dirección posible.
Atenuador: Una salida para atenuar lámparas LED de bajo voltaje.

La conmutación y la inversión de polaridad de las salidas se realiza mediante un puente H interno, la velocidad del motor y la atenuación se controlan mediante modulación de ancho de pulso.
Ficha técnica Nano Motor Controller Air
Contenido
- Montaje
- Puesta en marcha
- Modos de funcionamiento
- Notas sobre motores operativos
- Establecer valores límite actuales
- Entradas, salidas y propiedades
- Instrucciones de seguridad
- Documentos
Montaje↑
Instale el dispositivo en una caja de instalación adecuada.
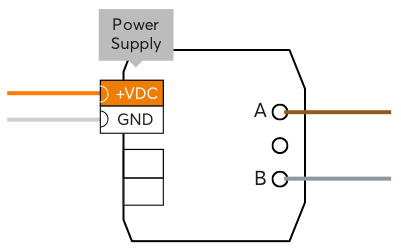
Conecte la fuente de alimentación (terminal naranja/blanco).
El nivel de la tensión de alimentación depende de la carga, pero debe estar en el rango de 9...26VDC.
Las salidas se conectan en función de los modo de funcionamiento seleccionados.
Puesta en marcha↑
En estado de fabrica, el modo de aprendizaje estará activo una vez establecida la alimentación. Esto se indica mediante el parpadeo rojo/verde/naranja del LED de estado.
A continuación, siga el procedimiento de aprendizaje en la interfaz Air.
Si desea activar el modo de aprendizaje manualmente, primero desconecte el dispositivo de la fuente de alimentación durante 10 segundos y luego vuelva a encenderlo. Si no se puede establecer una conexión a un Miniserver durante dos minutos, el modo de aprendizaje se activa durante 30 minutos.
Modos de funcionamiento↑
El Nano Motor Controller admite tres modos de funcionamiento que se pueden configurar en Loxone Config, que difieren en función y en la conexión de las salidas:
Motor bidireccional
En este modo de funcionamiento, está disponible una salida para motores de corriente continua que incluye control de dirección y velocidad.
La dirección de movimiento se puede cambiar durante el funcionamiento mediante el Nano Motor Controller invirtiendo la polaridad de las salidas:
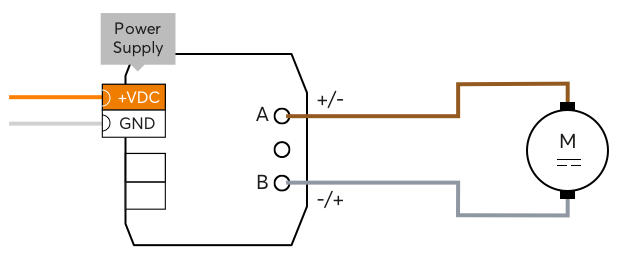
Esto es adecuado para aplicaciones donde es necesario un cambio de dirección, por ejemplo para accionamientos para cortinas o ventanas motorizadas.
Motor Unidireccional
En este modo de funcionamiento se encuentran disponibles dos salidas para motores de corriente continua incluido el control de velocidad, las salidas se pueden controlar independientemente entre sí.
La dirección del movimiento se determina al conectar:
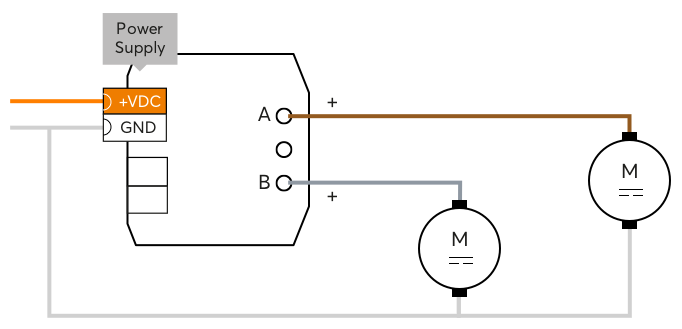
Esto es adecuado para aplicaciones en las que se deben controlar dos motores por separado.
Dimmer
En este modo de funcionamiento, está disponible una salida para atenuar lámparas LED de bajo voltaje:
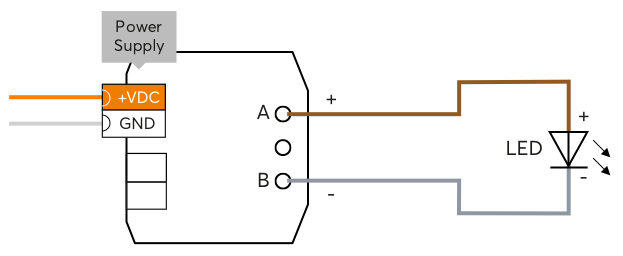
Esto es adecuado para fuentes de luz como tiras de LED o puntos que funcionan con un voltaje constante de, por ejemplo, 12 V o 24 V y se pueden regular mediante modulación de ancho de pulso (PWM).
Notas sobre motores operativos↑
La velocidad y sentido de giro de los motores se controla directamente a través de su tensión de alimentación.
La tensión se modula en ancho de pulso a las salidas del Nano Motor Controller, y en el modo bidireccional también se polariza la salida.
Los motores de CC reales con conmutador y escobillas son especialmente adecuados para esto.
Con Motores de DC sin escobillas (DC sin escobillas), el motor real está precedido por una electrónica que a menudo imposibilita el control PWM de la velocidad a través de la tensión de alimentación.
Estos motores solo se pueden encender o encender fuera de voluntad. Para hacer esto, seleccione 100% como la velocidad, el valor de la aceleración se puede configurar para saltar y no tiene protección de polaridad inversa.
Una Conexión en paralelo de motores en una salida solo es posible con reservas.
Para ello se debe asegurar que solo se utilicen motores del mismo tipo y que estén igualmente cargados.
El apagado por sobrecorriente del Nano Motor Controller puede activarse a pesar de un valor límite de sobrecorriente alto cuando los motores con un alto momento de inercia arrancan o desaceleran (frenan).
Esto se puede evitar disminuyendo el valor de aceleración y frenado a, por ejemplo, 20%/s para reducir la corriente consumida por el motor durante el arranque y la desaceleración.
Durante el primer segundo del arranque del motor, el umbral de sobrecorriente establecido se ignora y se fija en 5A. Si es demasiado corto, el límite de sobrecorriente se puede aumentar hasta 5 A para permitir el funcionamiento de motores con tiempos de arranque más prolongados. Se permite el funcionamiento de motores en el rango de sobrecorriente de 2,2 - 5 A durante máx. 30 segundos.
Cuando Detiene el motor no se detiene naturalmente, sino que el controlador del motor nano crea un efecto de frenado por motivos técnicos. Los frenos se pueden configurar a un valor adecuadamente inferior de manera que el comportamiento sea comparable al del natural litoral.
Establecer valores límite actuales↑
Se puede abrir una ventana con un diagrama para establecer los valores límite de corriente en las propiedades del Nano Motor Controller:

Luego se dibuja un diagrama utilizando el consumo de corriente actual del motor. Si hay un problema con el motor o el variador utilizado, los valores límite para el flujo de corriente y la sobrecorriente pueden adaptarse al motor o al variador.
Es aconsejable no ajustar demasiado los valores límite si la carga del motor y por tanto la corriente cambian algo más tarde debido a efectos como el desgaste o la influencia de la temperatura.
Finalmente, los valores se transfieren al Miniserver guardando el programa.
Sensores↑
| Resumen | Descripción | Rango de valores |
|---|---|---|
| Flujo de corriente | La entrada se activa cuando el consumo de corriente del motor está por encima del valor límite establecido para el flujo de corriente (modo de funcionamiento bidireccional) | 0/1 |
| Sobrecorriente | La entrada se activa cuando el consumo de corriente del motor está por encima del valor límite establecido para sobrecorriente (modo de funcionamiento bidireccional) | 0/1 |
| Flujo de corriente A | La entrada se activa cuando el consumo de corriente del motor A está por encima del valor límite establecido para el flujo de corriente A (modo de funcionamiento unidireccional) | 0/1 |
| Flujo de corriente B | La entrada se activa cuando el consumo de corriente del motor B está por encima del valor límite establecido para el flujo de corriente B (modo de funcionamiento unidireccional) | 0/1 |
| Sobrecorriente A | La entrada se activa cuando el consumo de corriente del motor A está por encima del valor límite establecido para sobrecorriente A (modo de funcionamiento unidireccional) | 0/1 |
| Sobrecorriente B | La entrada se activa cuando el consumo de corriente del motor B está por encima del valor límite establecido para el sobrecorriente B (modo de funcionamiento unidireccional) | 0/1 |
Actuadores↑
| Resumen | Descripción | Unidad | Rango de valores |
|---|---|---|---|
| Rotación derecha | La salida activa la rotación del motor hacia la derecha A+/B- (modo de funcionamiento bidireccional) | - | 0/1 |
| Rotación izquierda | La salida activa la rotación del motor hacia la derecha A+/B- (modo de funcionamiento bidireccional) | - | 0/1 |
| Iniciar/Detener A | La salida activa la rotación del motor hacia la derecha A+/B- (modo de funcionamiento bidireccional) | - | 0/1 |
| Iniciar/Detener B | La salida activa el motor B (modo de funcionamiento unidireccional) | - | 0/1 |
| Velocidad | La salida especifica la velocidad del motor (modo de funcionamiento bidireccional) Si no se utiliza la salida, se aplica la velocidad estándar |
% | 0...100 |
| Velocidad A | La salida especifica la velocidad del motor A (modo de funcionamiento unidireccional) Si no se utiliza la salida, se aplica la velocidad estándar |
% | 0...100 |
| Velocidad B | La salida especifica la velocidad del motor B (modo de funcionamiento unidireccional) Si no se utiliza la salida, se aplica la velocidad estándar |
% | 0...100 |
| Dimmer WW | Actuador estándar con un canal para controlar la iluminación (modo de funcionamiento Dimmer) | % | 0...100 |
| Actuador inteligente WW | Controlador iluminación WW para controlar la iluminación, el uso de componentes de iluminación compatibles (modo de funcionamiento Dimmer) | - | - |
Entradas de diagnóstico↑
| Resumen | Descripción | Unidad | Rango de valores |
|---|---|---|---|
| Estado de conexión Nano Motor Controller Air | Indica si el Miniserver puede acceder al dispositivo. Diagnóstico para dispositivos Air Diagnóstico para dispositivos Tree Diagnóstico de Extension |
Digital | 0/1 |
| Temperatura del sistema | Proporciona la temperatura interna del dispositivo. Esta suele ser la temperatura de la CPU o de otro lugar en el dispositivo. |
° | ∞ |
| Desconexión por temperatura | La entrada está activa, cuando las salidas del dispositivo se han desconectado debido a la alta temperatura del dispositivo. Posibles causas: Temperatura ambiente demasiado alta, salidas sobrecargadas. | Digital | 0/1 |
Propiedades↑
| Resumen | Descripción | Unidad | Rango de valores | Valor por defecto |
|---|---|---|---|---|
| Monitorizar | Si está marcado, se le notificará a través del Estado del Sistema o del Servicio de Correo si el dispositivo ya no está disponible o se desconecta. | - | - | - |
| Desactivar función repetidor | Desactive la función de repetidor de este dispositivo Air. Loxone Air se basa en la tecnología de malla. Cualquier dispositivo Air conectado a una fuente de alimentación puede repetir paquetes de otros dispositivos Air, ampliando así el alcance y la estabilidad del sistema global. En grandes sistemas con un gran número de dispositivos Air en un espacio reducido, la comunicación entre los dispositivos Air puede dar lugar a una utilización muy elevada del canal de radio. No se puede garantizar una accesibilidad fiable de los dispositivos Air. Desactivar la función de repetidor en dispositivos Air individuales puede ser de ayuda. No deshabilite esta función de forma imprudente, ya que podría afectar al alcance y la estabilidad del sistema. |
- | - | - |
| Número de serie | Número de serie del dispositivo Air | - | - | - |
| Tipo de dispositivo | Tipo de dispositivo Air | - | - | - |
| Modo operativo | Indica el modo de funcionamiento del Nano Motor Controller. Motor bidireccional: Una salida para motores de corriente continua que incluye control de dirección y velocidad. Motor unidireccional: Dos salidas para motores de corriente continua incluido control de velocidad, no es posible cambio de dirección. Atenuador: Una salida para atenuar lámparas LED de bajo voltaje. |
- | - | - |
| Límites actuales | Configure los límites actuales mediante un diagrama del amperaje actual. | - | - | - |
| Frecuencia PWM | Frecuencia de modulación del ancho de pulso. Se utiliza para adaptarse al motor. Por ejemplo, silbido desagradable puede ser eliminada. | Hz | 1000...10000 | 5000 |
| Umbral sobrecorriente | Se reconoce un flujo de corriente a partir de este valor. | mA | 100...5000 | 100 |
| Valor límite de sobreintensidad | Cuando se supera este valor, se detecta la sobreintensidad, la salida se desconecta y se activa la entrada de sobreintensidad. Durante el primer segundo del arranque del motor, el umbral de sobreintensidad ajustado se ignora y se fija en 5 A. El funcionamiento de los motores en el rango de sobreintensidad de 2,2 - 5 A se permite durante un máximo de 30 segundos. (Arranque del motor) La corriente total es relevante. |
mA | 100...5000 | 3500 |
| Acelerar | Velocidad de cambio al encender. Saltar significa que el valor objetivo se establece inmediatamente. |
- | - | - |
| Frenos | Velocidad de cambio al frenar. Saltar significa que el valor objetivo se establece inmediatamente. |
- | - | - |
| Velocidad estándar | Velocidad predeterminada si no se utiliza la salida de velocidad. | % | 0...100 | 100 |
Instrucciones de seguridad↑
La instalación de este dispositivo solo puede ser realizada por un técnico cualificado según normativa vigente, cumpliendo todas las normas vigentes en el país de la instalación, y siguiendo todas las instrucciones detalladas pertinentes.
La instalación de este dispositivo requiere que sea instalado en una carcasa adecuada para garantizar la protección contra el contacto, el agua y la suciedad.
Documentos↑
Ficha técnica Nano Motor Controller Air