Les sorties configurables permettent de connecter des moteurs ou des lampes LED dans les modes modes de fonctionnementsuivants:
Moteur bidirectionnel: Une sortie pour les moteurs à courant continu comprenant le contrôle de la direction et de la vitesse.
Moteur unidirectionnel:Deux sorties pour moteurs à courant continu avec contrôle de vitesse, non changement de direction possible.
Dimmer: Une sortie pour la variation des lampes LED basse tension.

La commutation et l’inversion de polarité des sorties sont effectuées par un pont en H interne, la vitesse du moteur et la variation sont contrôlées par modulation de largeur d’impulsion.
Fiche technique Nano Motor Controller Air
Table des matières
- Montage
- Mise en service
- Modes de fonctionnement
- Remarques sur le fonctionnement des moteurs
- Définir les valeurs limites actuelles
- Entrées, sorties, propriétés
- Conseil de sécurité
- Documents
Montage↑
Installez l’appareil dans une boîte d’installation appropriée.

Branchez l’alimentation (borne orange/blanche).
Le niveau de la tension d’alimentation dépend de la charge, mais doit être compris entre 9 et 26VDC.
Les sorties sont connectées selon le mode mode de fonctionnement sélectionné.
Mise en service↑
Le mode d’apprentissage est actif lorsqu’il est connecté à l’adaptateur secteur. Ceci est indiqué par la LED d’état en alternance avec rouge/ vert/orange.
Suivez ensuite le processus d’appairage
Si vous souhaitez activer manuellement le mode d’apprentissage, débranchez d’abord l’appareil de l’alimentation électrique pendant 10 secondes, puis rallumez-le. Si une connexion à un Miniserver ne peut pas être établie pendant deux minutes, le mode d’apprentissage est activé pendant 30 minutes.
Modes de fonctionnement↑
Le Nano Motor Controller prend en charge trois modes de fonctionnement qui peuvent être définis dans Loxone Config, qui diffèrent en fonction et lors de la connexion des sorties:
Moteur Bidirectionnel
Dans ce mode de fonctionnement, une sortie pour moteurs à courant continu avec contrôle du sens et de la vitesse est disponible.
Le sens du mouvement peut être commuté pendant le fonctionnement par le Nano Motor Controller en inversant la polarité des sorties:
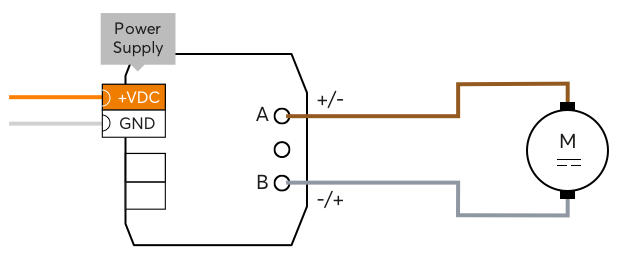
Cela convient aux applications où un changement de direction est nécessaire, par exemple pour les entraînements pour stores, rideaux ou fenêtres motorisées.
Moteur Unidirectionnel
Dans ce mode de fonctionnement, deux sorties sont disponibles pour les moteurs à courant continu, y compris la régulation de vitesse; les sorties peuvent être contrôlées indépendamment l’une de l’autre.
Le sens de déplacement est déterminé lors du raccordement:
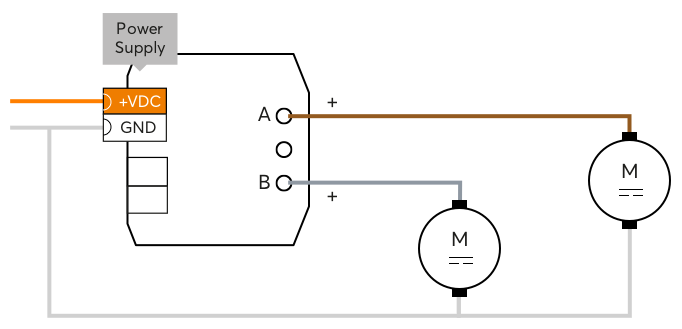
Ceci convient aux applications où deux moteurs doivent être contrôlés séparément.
Variateur
Dans ce mode de fonctionnement, une sortie est disponible pour la variation des lampes LED basse tension:
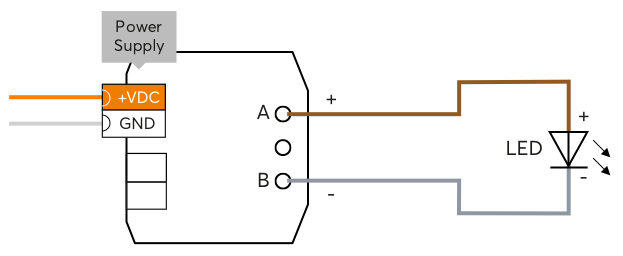
Cela convient aux sources lumineuses telles que les bandes LED ou les spots qui fonctionnent avec une tension constante de 12 V ou 24 V par exemple et peuvent être atténuées par modulation de largeur d’impulsion (PWM).
Remarques sur le fonctionnement des moteurs↑
La vitesse et la direction des moteurs sont contrôlées directement via leur tension d’alimentation.
La tension aux sorties du Nano Motor Controller est modulée en largeur d’impulsion pour contrôler la vitesse et, en mode bidirectionnel, elle inverse la polarité pour changer la direction.
Les vrais moteurs à courant continu avec un collecteur et des balais sont particulièrement adaptés à cela.
Avec Moteur CC sans balai (Brushless DC), le moteur proprement dit est précédé par l’électronique qui rend souvent impossible le contrôle PWM de la vitesse via la tension d’alimentation.
Ces moteurs ne peuvent être allumés ou éteints que sur demande. Pour ce faire, sélectionnez 100% comme vitesse, la valeur d’accélération peut être définie pour sauter et il n’a pas de protection contre l’inversion de polarité.
Une connexion en parallèle des moteurs à une sortie n’est possible que sous réserve.
Pour cela, il faut s’assurer que seuls des moteurs du même type sont utilisés et qu’ils sont également chargés.
L’arrêt de surintensité du Nano Motor Controller peut se déclencher malgré une valeur limite de surintensité élevée lorsque les moteurs avec un moment d’inertie élevé démarrent ou décélèrent(frein).
Ceci peut être évité en diminuant la valeur d’accélération et de freinage à par ex. 20%/s afin de réduire le courant consommé par le moteur lors du démarrage et de la décélération.
La coupure de surintensité est désactivée pendant la première seconde de démarrage du moteur. Le moteur ne sera arrêté que si le courant dépasse 5A.
Lorsque le Arrêt du moteur, il ne s’arrête pas naturellement, mais un effet de freinage est créé par le Nano Motor Controller pour des raisons techniques.
Si le moteur doit ralentir sans effet de freinage, le La valeur des freins peut être réglée sur une valeur plus basse de manière à ce que le comportement soit comparable à celui du roulage naturel.
Définir les valeurs limites actuelles↑
Une fenêtre avec un diagramme de réglage des valeurs limites de courant peut être ouverte dans les propriétés du Nano Motor Controller:

Un diagramme est ensuite dessiné en utilisant la consommation de courant du moteur. En cas de problème avec le moteur ou le variateur utilisé, les valeurs limites de courant et de surintensité peuvent être adaptées au moteur ou au variateur.
Il est conseillé de ne pas régler trop serrées les valeurs limites si jamais la charge du moteur et donc le courant changent un peu plus tard en raison d’effets tels que l’usure ou l’influence de la température.
Enfin, les valeurs sont transférées vers le Miniserveur en enregistrant le programme.
Capteurs↑
| Résumé | Description |
|---|---|
| Flux de courant | L’entrée devient active lorsque la consommation de courant du moteur est supérieure à la valeur limite réglée pour le flux de courant (mode de fonctionnement bidirectionnel) |
| Surintensité | L’entrée devient active lorsque la consommation de courant du moteur est supérieure à la valeur limite réglée pour la surintensité (mode de fonctionnement bidirectionnel) |
| Flux de courant A | L’entrée devient active lorsque la consommation de courant du moteur A est supérieure à la valeur limite réglée pour le flux de courant A (mode de fonctionnement unidirectionnel) |
| Flux de courant B | L’entrée devient active lorsque la consommation de courant du moteur B est supérieure à la valeur limite réglée pour le flux de courant B (mode de fonctionnement unidirectionnel) |
| Surintensité A | L’entrée devient active lorsque la consommation de courant du moteur A est supérieure à la valeur limite réglée pour la surintensité A (mode de fonctionnement unidirectionnel) |
| Surintensité B | L’entrée devient active lorsque la consommation de courant du moteur B est supérieure à la valeur limite réglée pour la surintensité B (mode de fonctionnement unidirectionnel) |
Actionneurs↑
| Résumé | Description | Unité | Valeurs |
|---|---|---|---|
| Rotation droite | La sortie active la rotation horaire du moteur A+/B- (mode de fonctionnement bidirectionnel) | – | – |
| Rotation gauche | La sortie active le moteur dans le sens antihoraire A-/B+ (mode de fonctionnement bidirectionnel) | – | – |
| Marche/Arrêt A | La sortie active le moteur A (mode de fonctionnement unidirectionnel) | – | – |
| Marche/Arrêt B | La sortie active le moteur B (mode de fonctionnement unidirectionnel) | – | – |
| Vitesse | La sortie spécifie la vitesse du moteur (mode de fonctionnement bidirectionnel) Si la sortie n’est pas utilisée, la vitesse standard s’applique |
% | 0…100 |
| Vitesse A | La sortie spécifie la vitesse du moteur A (mode de fonctionnement unidirectionnel) Si la sortie n’est pas utilisée, la vitesse standard s’applique |
% | – |
| Vitesse B | La sortie spécifie la vitesse du moteur B (mode de fonctionnement unidirectionnel) Si la sortie n’est pas utilisée, la vitesse standard s’applique |
% | – |
| Variateur WW | Actionneur standard avec un canal pour la commande de l’éclairage (mode de fonctionnement variateur) | % | – |
| Actionneur Smart WW | Controleur d’éclairage WW pour contrôler l’éclairage, à utiliser sur des modules d’éclairage compatibles (mode de fonctionnement variateur) | – | – |
Entrées diagnostic↑
| Résumé | Description | Unité | Valeurs |
|---|---|---|---|
| Statut en ligne Nano Motor Controller Air | Numérique | – | |
| Température du système | ° | ∞ | |
| Température d’arrêt | Si la température du CPU atteint un point critique, les sorties de l’appareil sont désactivées. Cela peut être dû à des courts-circuits, à des charges de commutation surchargées ou à des températures ambiantes trop élevées. | Numérique | – |
Propriétés↑
| Résumé | Description | Unité | Valeurs | Valeur défaut |
|---|---|---|---|---|
| Surveiller le statut en ligne | Si cette case est cochée, vous serez averti via l’app Loxone ou le Cloud Mailer lorsque l’appareil n’est plus disponible ou hors ligne. | – | – | – |
| Désactiver la fonctionnalité routeur | Désactiver la fonctionnalité routeur de ce périphérique Air.
Loxone Air est basé sur la technologie du maillage. Tout appareil Air connecté à l’alimentation peut acheminer des paquets provenant d’autres appareils Air, augmentant ainsi la portée et la stabilité de l’ensemble du système. Dans les grands systèmes avec un grand nombre d’appareils Air dans un espace confiné, la communication entre les appareils Air peut entraîner une utilisation très élevée des canaux radio. Une accessibilité fiable des appareils Air ne peut être garantie. La désactivation de la fonctionnalité de routeur sur des appareils Air individuels peut aider. Ne désactivez pas cette fonctionnalité de manière imprudente, car elle peut affecter la portée et la stabilité du système. |
– | – | – |
| Numéro de série Air | Numéro de série du produit Air | – | – | – |
| Type d’appareil | Type d’appareil Air | – | – | – |
| Mode de fonctionnement | Spécifie le mode de fonctionnement du Nano Motor Controller. Moteur bidirectionnel: une sortie pour moteurs à courant continu avec contrôle de la direction et de la vitesse. Moteur unidirectionnel: Deux sorties pour moteurs à courant continu et contrôle de vitesse, aucun changement de direction possible. Variateur: Une sortie pour atténuer les lumières LED basse tension. |
– | – | – |
| Limites actuelles | Configurez les limites de courant à l’aide d’un diagramme de l’ampérage actuel. | – | – | – |
| Fréquence PWM | Fréquence de modulation à largeur d’impulsion (PWM). Utilisé pour s’adapter au moteur. Par exemple, les sifflements désagréables peuvent être éliminés. | Hz | 1000…10000 | 5000 |
| Seuil de courant | Le flux de courant est détecté à partir de cette valeur. | mA | 100…3500 | 100 |
| Valeur limite de surintensité | A partir de cette valeur, une surintensité est détectée, la sortie se désactive et l’entrée de surintensité devient active. Le courant total des sorties ne doit pas dépasser 3,5A. | mA | 100…3500 | 3500 |
| Accélérer | Vitesse de changement lors de la mise en marche. Sauter signifie que la valeur cible est définie immédiatement. |
– | – | – |
| Freins | Vitesse de changement lors du freinage. Sauter signifie que la valeur cible est définie immédiatement. |
– | – | – |
| Vitesse standard | Vitesse par défaut si la sortie vitesse n’est pas utilisée. | % | 0…100 | 100 |
Conseil de sécurité↑
L’installation doit être effectuée par un électricien qualifié conformément aux réglementations en vigueur.
L’installation nécessite d’être dans un boîtier approprié pour assurer la protection contre les contacts, l’eau et la saleté.
L’appareil ne doit pas être utilisé pour des applications critiques pour la sécurité.
Documents↑
Fiche technique Nano Motor Controller Air