Le Nano Motor Controller Tree est un module compact avec des sorties de courant continu, qui est contrôlé via l'interface Loxone Tree.
Les sorties configurables permettent de connecter des moteurs ou des lampes LED dans les modes suivants $LINK::#modes@@modes de fonctionnement$$:
Moteur bidirectionnel: Une sortie pour les moteurs à courant continu comprenant le contrôle de la direction et de la vitesse.
Moteur unidirectionnel: Deux sorties pour moteurs à courant continu avec contrôle de vitesse, $$U:: Pas de changement de direction possible
Dimmer: Une sortie pour la variation des lampes LED basse tension.

La commutation et l'inversion de polarité des sorties sont effectuées par un pont en H interne, la vitesse du moteur et la variation sont contrôlées par modulation de largeur d'impulsion.
Fiche technique Nano Motor Controller Tree
Table des matières
- Montage
- Mise en service
- Modes de fonctionnement
- Remarques sur le fonctionnement des moteurs
- Définir les valeurs limites actuelles
- Entrées, sorties, propriétés
- Conseil de sécurité
- Documents
Montage↑
Installez l'appareil dans une boîte d'installation appropriée.
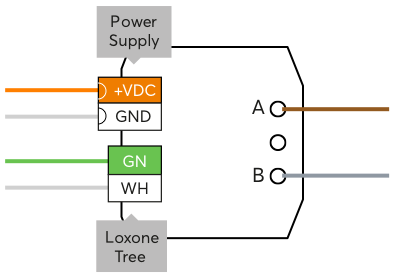
Connectez l'alimentation (borne à vis orange/blanche) et les lignes de données Tree (borne verte/blanche).
Le niveau de la tension d'alimentation dépend de la charge, mais doit être compris entre 9 et 26VDC.
Les sorties sont connectées en fonction des modes mode de fonctionnement.
Après la mise sous tension, la LED d'état clignote en orange après un court instant si le câblage est correct (la connexion à Tree Extension/Miniserver existe).
Mise en service↑
Suivez ensuite la procédure d'appairage sur l'interface arborescente.
Modes de fonctionnement↑
Le contrôleur de moteur nano prend en charge trois modes de fonctionnement qui peuvent être définis dans Loxone Config, qui diffèrent en fonction et lors de la connexion des sorties:
Moteur Bidirectionnel
Dans ce mode de fonctionnement, une sortie pour moteurs à courant continu avec contrôle du sens et de la vitesse est disponible.
Le sens du mouvement peut être commuté pendant le fonctionnement par le Nano Motor Controller en inversant la polarité des sorties:
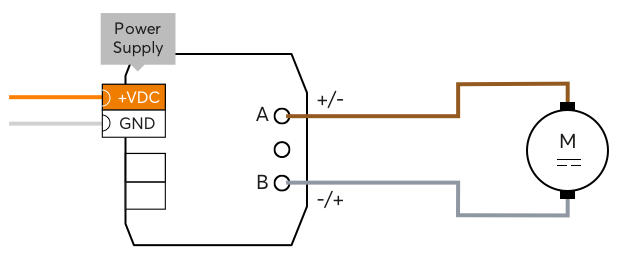
Cela convient aux applications où un changement de direction est nécessaire, par exemple pour les rideaux, stores ou fenêtres motorisés.
Moteur unidirectionnel
Dans ce mode de fonctionnement, deux sorties sont disponibles pour les moteurs à courant continu, y compris la régulation de vitesse; les sorties peuvent être contrôlées indépendamment l'une de l'autre.
Le sens de déplacement est déterminé lors du raccordement:
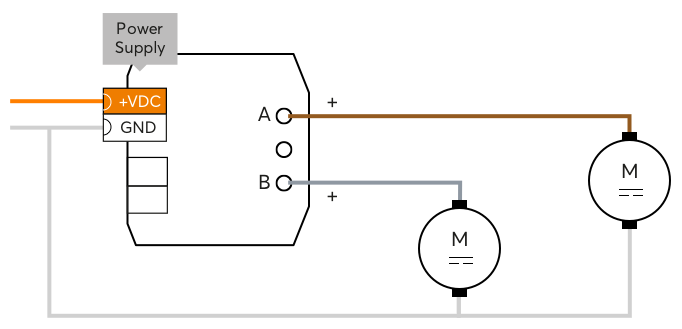
Ceci convient aux applications où deux moteurs doivent être contrôlés séparément.
Variateur
Dans ce mode de fonctionnement, une sortie est disponible pour la variation des lampes LED basse tension:
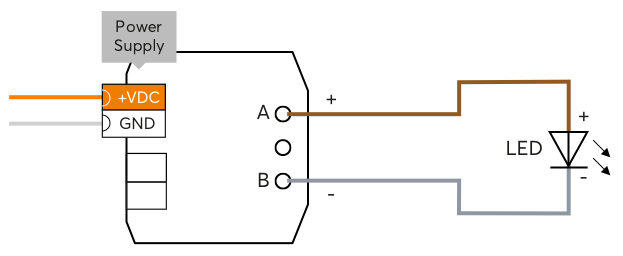
Cela convient aux sources lumineuses telles que les bandes LED ou les spots qui fonctionnent avec une tension constante de 12 V ou 24 V par exemple et peuvent être atténuées par modulation de largeur d'impulsion (PWM).
Remarques sur le fonctionnement des moteurs↑
La vitesse et la direction des moteurs sont contrôlées directement via leur tension d'alimentation.
La tension aux sorties du Nano Motor Controller est modulée en largeur d'impulsion pour contrôler la vitesse et, en mode bidirectionnel, elle inverse la polarité pour changer la direction.
Les vrais moteurs à courant continu avec un collecteur et des balais sont particulièrement adaptés à cela.
Avec Moteur CC sans balai (Brushless DC), le moteur proprement dit est précédé par l'électronique qui rend souvent impossible le contrôle PWM de la vitesse via la tension d'alimentation.
Ces moteurs ne peuvent être allumés ou éteints que sur demande. Pour ce faire, sélectionnez 100% comme vitesse, la valeur d'accélération peut être définie pour sauter et il n'a pas de protection contre l'inversion de polarité.
Une connexion en parallèle des moteurs à une sortie n'est possible que sous réserve.
Pour cela, il faut s'assurer que seuls des moteurs du même type sont utilisés et qu'ils sont également chargés.
L'arrêt par surintensité du Nano Motor Controller peut se déclencher malgré une valeur limite de surintensité élevée lorsque les moteurs avec un moment d'inertie élevé démarrent ou décélérent (freinent).
Cela peut être évité en diminuant la valeur d'accélération et de freinage, par ex. 20%/s afin de réduire le courant consommé par le moteur lors du démarrage et de la décélération.
Pendant la première seconde de démarrage du moteur, le seuil de surintensité réglé est ignoré et est fixé à 5A. Si celle-ci est trop courte, la limite de surintensité peut être augmentée jusqu'à 5 A pour permettre le fonctionnement de moteurs avec des temps de démarrage plus longs. Le fonctionnement de moteurs dans la plage de surintensité de 2,2 à 5 A est autorisé pendant max. 30 secondes.
Lorsque le Arrêt du moteur, il ne s'arrête pas naturellement, mais un effet de freinage est créé par le Nano Motor Controller pour des raisons techniques.
Si le moteur doit ralentir sans effet de freinage, le La valeur des freins peut être réglée sur une valeur plus basse de manière à ce que le comportement soit comparable à celui du roulage naturel.
Définir les valeurs limites actuelles↑
Une fenêtre avec un diagramme de réglage des valeurs limites de courant peut être ouverte dans les propriétés du Nano Motor Controller:

Un diagramme est ensuite dessiné en utilisant la consommation de courant du moteur. En cas de problème avec le moteur ou le variateur utilisé, les valeurs limites de courant et de surintensité peuvent être adaptées au moteur ou au variateur.
Il est conseillé de ne pas régler trop serrées les valeurs limites si jamais la charge du moteur et donc le courant changent un peu plus tard en raison d'effets tels que l'usure ou l'influence de la température.
Enfin, les valeurs sont transférées vers le Miniserveur en enregistrant le programme.
Capteurs↑
| Résumé | Description | Valeurs |
|---|---|---|
| Flux de courant | L'entrée devient active lorsque la consommation de courant du moteur est supérieure à la valeur limite réglée pour le flux de courant (mode de fonctionnement bidirectionnel) | 0/1 |
| Surintensité | L'entrée devient active lorsque la consommation de courant du moteur est supérieure à la valeur limite réglée pour la surintensité (mode de fonctionnement bidirectionnel) | 0/1 |
| Flux de courant A | L'entrée devient active lorsque la consommation de courant du moteur A est supérieure à la valeur limite réglée pour le flux de courant A (mode de fonctionnement unidirectionnel) | 0/1 |
| Flux de courant B | L'entrée devient active lorsque la consommation de courant du moteur B est supérieure à la valeur limite réglée pour le flux de courant B (mode de fonctionnement unidirectionnel) | 0/1 |
| Surintensité A | L'entrée devient active lorsque la consommation de courant du moteur A est supérieure à la valeur limite réglée pour la surintensité A (mode de fonctionnement unidirectionnel) | 0/1 |
| Surintensité B | L'entrée devient active lorsque la consommation de courant du moteur B est supérieure à la valeur limite réglée pour la surintensité B (mode de fonctionnement unidirectionnel) | 0/1 |
Actionneurs↑
| Résumé | Description | Unité | Valeurs |
|---|---|---|---|
| Rotation droite | La sortie active la rotation droite du moteur A + / B- (mode de fonctionnement bidirectionnel) | - | 0/1 |
| Rotation gauche | La sortie active le moteur vers la gauche A-/B+ (mode de fonctionnement bidirectionnel) | - | 0/1 |
| Marche/Arrêt A | La sortie active le moteur A (mode de fonctionnement unidirectionnel) | - | 0/1 |
| Marche/Arrêt B | La sortie active le moteur B (mode de fonctionnement unidirectionnel) | - | 0/1 |
| Vitesse | La sortie spécifie la vitesse du moteur (mode de fonctionnement bidirectionnel) Si la sortie n'est pas utilisée, la vitesse standard s'applique |
% | 0...100 |
| Vitesse A | La sortie spécifie la vitesse du moteur A (mode de fonctionnement unidirectionnel) Si la sortie n'est pas utilisée, la vitesse standard s'applique |
% | 0...100 |
| Vitesse B | La sortie spécifie la vitesse du moteur B (mode de fonctionnement unidirectionnel) Si la sortie n'est pas utilisée, la vitesse standard s'applique |
% | 0...100 |
| Variateur WW | Actionneur standard avec un canal pour contrôler l'éclairage (mode de fonctionnement Variation) | % | 0...100 |
| Actionneur Smart WW | Smart Actuator WW pour contrôler l'éclairage, à utiliser sur des blocs d'éclairage compatibles (mode de fonctionnement variateur) | - | - |
Entrées diagnostic↑
| Résumé | Description | Unité | Valeurs |
|---|---|---|---|
| Statut en ligne Nano Motor Controller Tree | Indique si l'appareil est accessible par le miniserveur. Diagnostics for Air devices Diagnostics pour les appareils Tree Diagnostics pour les extensions |
Numérique | 0/1 |
| Température du système | Fournit la température interne de l'appareil. Il s'agit souvent de la température du processeur ou d'un autre emplacement de l'appareil. |
° | ∞ |
| Température d'arrêt | L'entrée est active, lorsque les sorties de l'appareil ont été désactivées en raison d'une température élevée de l'appareil. Raisons possibles : Température ambiante trop élevée, sorties surchargées. | Numérique | 0/1 |
Propriétés↑
| Résumé | Description | Unité | Valeurs | Valeur défaut |
|---|---|---|---|---|
| Surveiller le statut en ligne | Si cette case est cochée, vous serez informé via l'état du système ou le courrier électronique si l'appareil n'est plus disponible ou s'il est mis hors ligne. | - | - | - |
| Numéro de série | Spécifie le numéro de série de l'appareil. Pour les extensions : saisissez 'Auto' pour coupler automatiquement une extension avec un numéro de série inconnu. Cela ne peut être utilisé que s'il n'y a qu'une seule extension du même type. Enregistrez dans le Miniserver, afin d'appairer l'Extension. Ensuite, le programme doit être chargé à partir du Miniserver pour transférer le numéro de série réel de l'extension dans le programme. |
- | - | - |
| Type d'appareil | Type d'appareil Tree | - | - | - |
| Mode de fonctionnement | Spécifie le mode de fonctionnement du Nano Motor Controller. Moteur bidirectionnel: une sortie pour moteurs à courant continu avec contrôle de la direction et de la vitesse. Moteur unidirectionnel: Deux sorties pour moteurs à courant continu et contrôle de vitesse, aucun changement de direction possible. Variateur: Une sortie pour atténuer les lumières LED basse tension. |
- | - | - |
| Limites actuelles | Configurez les limites de courant à l'aide d'un diagramme de l'ampérage actuel. | - | - | - |
| Fréquence PWM | Fréquence de modulation à largeur d'impulsion (PWM). Utilisé pour s'adapter au moteur. Par exemple, les sifflements désagréables peuvent être éliminés. | Hz | 1000...10000 | 5000 |
| Seuil de courant | Le flux de courant est détecté à partir de cette valeur. | mA | 100...5000 | 100 |
| Valeur limite de surintensité | Lorsque cette valeur est dépassée, une surintensité est détectée, la sortie s'éteint et l'entrée de surintensité est activée. Pendant la première seconde de démarrage du moteur, le seuil de surintensité réglé est ignoré et est fixé à 5A. Le fonctionnement de moteurs dans la plage de surintensité de 2,2 à 5 A est autorisé pendant max. 30 secondes. (Démarrage du moteur) Le courant total est pertinent. |
mA | 100...5000 | 3500 |
| Accélérer | Vitesse de changement lors de la mise en marche. Sauter signifie que la valeur cible est définie immédiatement. |
- | - | - |
| Freins | Vitesse de changement lors du freinage. Sauter signifie que la valeur cible est définie immédiatement. |
- | - | - |
| Vitesse standard | Vitesse par défaut si la sortie vitesse n'est pas utilisée. | % | 0...100 | 100 |
Conseil de sécurité↑
L'installation doit être effectuée par un électricien qualifié conformément aux réglementations en vigueur.
L'installation nécessite d'être dans un boîtier approprié pour assurer la protection contre les contacts, l'eau et la saleté.
Documents↑
Fiche technique Nano Motor Controller Tree
Températures d'arrêt thermique