Il Nano Motor Controller Tree è un modulo compatto con uscite di corrente continua, che viene comandato tramite l'interfaccia Loxone Tree.
Le uscite configurabili permettono di collegare motori o lampade a LED nelle seguenti modalità di funzionamento:
Motore Bidirezionale:: un'uscita per i motori in corrente continua incluso il controllo della direzione di marcia e della velocità.
Motore Unidirezionale: due uscite per motori in corrente continua incluso il controllo della velocità, nessun cambio di direzione possibile.
Dimmer: un'uscita per la dimmerazione delle lampade a LED a bassa tensione.

La commutazione e l'inversione di polarità delle uscite è effettuata da un ponte H interno, la velocità del motore e la dimmerazione sono controllate dalla modulazione di larghezza d'impulso.
Scheda tecnica Nano Motor Controller Tree
Contenuto
- Montaggio
- Messa in servizio
- Modalità di funzionamento
- Note sul funzionamento dei motori
- Impostare valori limite di corrente
- Ingressi, uscite, proprietà
- Avvisi di sicurezza
- Documenti
Montaggio↑
Installare il dispositivo in una scatola di installazione adatta.
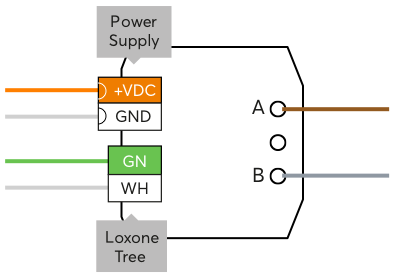
Collegare l'alimentazione (terminale arancione/bianco) e le linee dati Tree (terminale verde/bianco).
Il livello della tensione di alimentazione dipende dal carico, ma deve essere nel range di 9...26VDC.
Le uscite sono collegate secondo la modalità di funzionamento selezionata.
Dopo aver acceso l'alimentazione, il LED di stato lampeggia in arancione dopo breve tempo se il cablaggio è corretto (esiste una connessione con Tree Extension / Miniserver).
Messa in servizio↑
Poi seguite la procedura di apprendimento sull'interfaccia Tree.
Modalità di funzionamento↑
Il Nano Motor Controller supporta tre modalità di funzionamento che possono essere impostate in Loxone Config, che si differenziano per la funzione e per il collegamento delle uscite:
Motore Bidirezionale
In questa modalità di funzionamento, è disponibile un'uscita per motori DC che include il controllo della direzione di marcia e il controllo della velocità.
La direzione di marcia può essere cambiata durante il funzionamento dal Nano Motor Controller invertendo la polarità delle uscite:
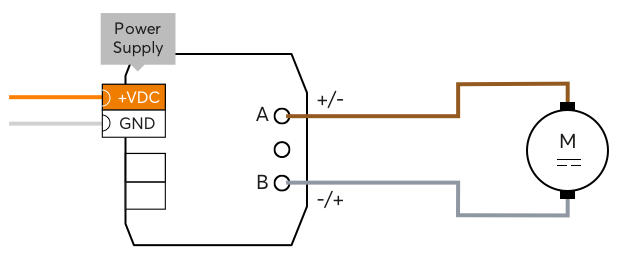
Questo è adatto per applicazioni in cui è necessario un cambio di direzione, per esempio per l'azionamento di oscuranti, tende o finestre motorizzate.
Motore Unidirezionale
In questa modalità di funzionamento sono disponibili due uscite per i motori DC compreso il controllo della velocità, le uscite possono essere controllate indipendentemente l'una dall'altra.
La direzione di marcia è determinata al momento della connessione:
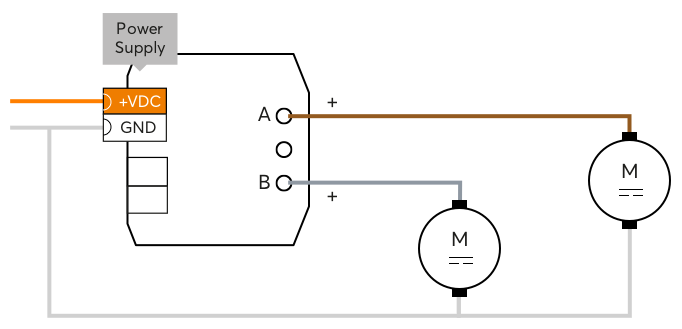
Questo è adatto per applicazioni in cui due motori devono essere controllati separatamente.
Dimmer
In questa modalità di funzionamento, un'uscita è disponibile per la dimmerazione delle lampade a LED a bassa tensione:
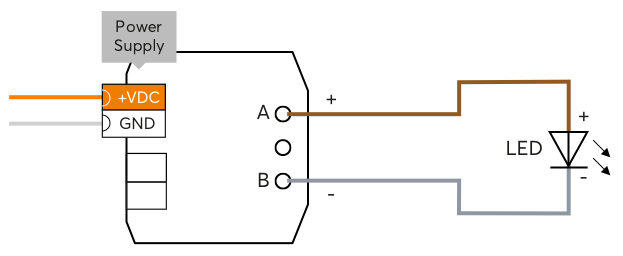
Questo è adatto per luci come strisce LED o spot, che funzionano con una tensione costante, ad esempio 12V o 24V e possono essere dimmerate con la modulazione di larghezza di impulso (PWM).
Note sul funzionamento dei motori↑
La velocità e il senso di marcia dei motori sono controllati direttamente attraverso la loro tensione di alimentazione.
La tensione alle uscite del Nano Motor Controller è modulata a larghezza d'impulso, e in modalità bidirezionale viene anche emessa con polarità invertita.
I veri motori in corrente continua, che hanno un commutatore e delle spazzole, sono particolarmente adatti.
I motori brushless a corrente continua, sono dotati di un controller interno, che rende spesso impossibile il controllo PWM della velocità attraverso la tensione di alimentazione.
Tali motori possono essere solo accesi o spenti. Per fare questo, selezionare 100% come velocità, e il valore per l'accelerazione può essere impostato su salto.
L'inversione del senso di rotazione spesso non è possibile, e c'è anche il rischio di danneggiare l'elettronica del motore se non è adatta all'inversione di direzione e non ha una protezione contro l'inversione di polarità.
Un collegamento in parallelo di motori a un'uscita è possibile solo in determinate condizioni.
Bisogna assicurarsi che vengano utilizzati solo motori dello stesso tipo e che siano ugualmente caricati.
Lo spegnimento per sovracorrente del Nano Motor Controller può attivarsi nonostante un valore limite di sovracorrente elevato quando i motori con un elevato momento di inerzia si avviano o decelerano (frenano).
Questo problema può essere evitato diminuendo il valore per l'accelerazione e la frenata, ad esempio al 20%/s, per ridurre la corrente assorbita dal motore durante l'avvio e la decelerazione.
Durante il primo secondo di avvio del motore, la soglia di sovracorrente impostata viene ignorata e fissata a 5A. Se questo valore è troppo basso, il limite di sovracorrente può essere aumentato fino a 5A per consentire il funzionamento di motori con tempi di avvio più lunghi. Il funzionamento dei motori nell'intervallo di sovracorrente di 2,2 - 5A è consentito per un massimo di 30 secondi.
Quando il motore si ferma, non si ferma naturalmente, ma il Nano Motor Controller crea un effetto frenante per ragioni tecniche.
Se si desidera un decelerazione senza frenata, il valore per la frenata deve essere impostato su un valore inferiore adeguato in modo da ottenere un comportamento paragonabile alla decelerazione naturale.
Impostare valori limite di corrente↑
Nelle proprietà del Nano Motor Controller è possibile aprire una finestra con un diagramma per impostare i valori limite di corrente:

In seguito viene disegnato un diagramma con l'aiuto dell'assorbimento di corrente attuale del motore. Tramite un giro di prova del motore o dell'azionamento utilizzato, i valori limite per il flusso di corrente e la sovracorrente possono essere adattati al motore o all'azionamento.
Si raccomanda di non impostare i valori limite troppo vicini, nel caso in cui in un secondo momento il carico del motore e quindi la corrente cambino un po' a causa di effetti come l'usura o l'influenza della temperatura.
Infine, i valori vengono applicati al Miniserver salvando il programma.
Sensori↑
| Descrizione breve | Descrizione | Campo di valore |
|---|---|---|
| Flusso di corrente | L'ingresso si attiva quando la corrente massima del motore supera il valore limite impostato per il flusso di corrente (modo operativo bidirezionale) | 0/1 |
| Sovracorrente | L'ingresso si attiva quando la corrente massima del motore supera il valore limite impostato per la sovracorrente (modo operativo bidirezionale) | 0/1 |
| Flusso di corrente A | L'ingresso si attiva quando la corrente massima del motore A supera il valore limite impostato per il flusso di corrente A (modo operativo unidirezionale) | 0/1 |
| Flusso di corrente B | L'ingresso si attiva quando la corrente massima del motore B supera il valore limite impostato per il flusso di corrente B (modo operativo unidirezionale) | 0/1 |
| Sovracorrente A | L'ingresso si attiva quando la corrente massima del motore A supera il valore limite impostato per la sovracorrente A (modo operativo unidirezionale) | 0/1 |
| Sovracorrente B | L'ingresso si attiva quando la corrente massima del motore B supera il valore limite impostato per la sovracorrente B (modo operativo unidirezionale) | 0/1 |
Attuatori↑
| Descrizione breve | Descrizione | Unità | Campo di valore |
|---|---|---|---|
| Rotazione in senso orario | L'uscita attiva il motore in rotazione in senso orario A+/B- (modalità bidirezionale) | - | 0/1 |
| Rotazione antioraria | L'uscita attiva il motore in rotazione antioraria A+/B- (modalità bidirezionale) | - | 0/1 |
| Avviamento/Arresto A | L'uscita attiva il motore A (modalità unidirezionale) | - | 0/1 |
| Avviamento/Arresto B | L'uscita attiva il motore B (modalità unidirezionale) | - | 0/1 |
| Velocità | L'uscita specifica la velocità per il motore (modalità bidirezionale) Se l'uscita non viene utilizzata, si applica la velocità di default |
% | 0...100 |
| Velocità A | L'uscita specifica la velocità per il motore A (modalità unidirezionale) Se l'uscita non viene utilizzata, si applica la velocità di default |
% | 0...100 |
| Velocità B | L'uscita specifica la velocità per il motore B (modalità unidirezionale) Se l'uscita non viene utilizzata, si applica la velocità di default |
% | 0...100 |
| Dimmer bianco caldo | Attuatore standard con un canale per il controllo dell'illuminazione (modalità di funzionamento dimmer) | % | 0...100 |
| Attuatore smart bianco caldo | Attuatore intelligente bianco caldo per il controllo dell'illuminazione, utilizzo su blocchi di illuminazione compatibili (modalità di funzionamento dimmer) | - | - |
Ingressi di diagnosi↑
| Descrizione breve | Descrizione | Unità | Campo di valore |
|---|---|---|---|
| Stato online Nano Motor Controller Tree | Indica se il dispositivo è raggiungibile dal Miniserver. Diagnostica per dispositivi Air Diagnostica per dispositivi Tree Diagnostica per Estensioni |
Digitale | 0/1 |
| Temperatura di sistema | Fornisce la temperatura interna del dispositivo. Si tratta normalmente della temperatura della CPU o di un altro punto del dispositivo. |
° | ∞ |
| Spegnimento temperatura | L'ingresso è attivo quando le uscite del dispositivo sono state disattivate a causa dell'elevata temperatura del dispositivo. Possibili motivi: Temperatura ambiente troppo elevata, uscite sovraccariche. | Digitale | 0/1 |
Proprietà↑
| Descrizione breve | Descrizione | Unità | Campo di valore | Valore predefinito |
|---|---|---|---|---|
| Monitora lo stato online | Se selezionato, riceverai una notifica tramite lo Stato di Sistema o il Mailer, quando il dispositivo non è più disponibile o offline. | - | - | - |
| Numero seriale | Specifica il numero di serie del dispositivo. Inserisci 'Auto' per apprendere automaticamente un dispositivo Tree con numero di serie sconosciuto. Questo può essere utilizzato solo se c'è un solo dispositivo Tree dello stesso tipo. Salvare nel Miniserver per apprendere il dispositivo Tree. Dopo, il programma deve essere scaricato dal Miniserver per trasferire il numero di serie effettivo del dispositivo Tree nel programma. |
- | - | - |
| Tipo di dispositivo | Tree tipo dispositivo | - | - | - |
| Modalità di funzionamento | Indica la modalità di funzionamento del Nano Motor Controller. Motore Bidirezionale: un'uscita per i motori in corrente continua compreso il controllo della direzione di marcia e della velocità. Motore Unidirezionale: due uscite per motori in corrente continua incluso il controllo della velocità, nessun cambio di direzione possibile. Dimmer: un'uscita per la dimmerazione delle lampade a LED a bassa tensione. |
- | - | - |
| Valori limite di corrente | Configurare i valori limite di corrente utilizzando un diagramma dell'intensità di corrente attuale. | - | - | - |
| Frequenza PWM | Frequenza della modulazione di larghezza d'impulso. Serve per adattarsi al motore. Ad esempio, i fischi fastidiosi possono essere eliminati. | Hz | 1000...10000 | 5000 |
| Valore limite di flusso di corrente | A partire da questo valore viene rilevato un flusso di corrente. | mA | 100...5000 | 100 |
| Valore limite di sovracorrente | Quando questo valore viene superato, viene rilevata una sovracorrente, l'uscita si spegne e si attiva l'ingresso di sovracorrente. Durante il primo secondo dall'avvio del motore, la soglia di sovracorrente impostata viene ignorata e fissata a 5A. Il funzionamento dei motori nell'intervallo di sovracorrente di 2,2 - 5A è consentito per un massimo di 30 secondi. (Avvio del motore) La corrente totale è rilevante. |
mA | 100...5000 | 3500 |
| Accelerare | Velocità di cambiamento all'accensione. Salto significa che il valore target è impostato immediatamente. |
- | - | - |
| Rallentare | Velocità di cambiamento quando si rallenta Salto significa che il valore target è impostato immediatamente. |
- | - | - |
| Velocità standard | Velocità predefinita quando l'uscita di velocità non è utilizzata. | % | 0...100 | 100 |
Avvisi di sicurezza↑
L'installazione deve essere eseguita da un elettricista qualificato in conformità alle norme vigenti.
L'installazione richiede il montaggio in una custodia adeguata per garantire la protezione contro il contatto, l'acqua e la sporcizia.
Documenti↑
Scheda tecnica Nano Motor Controller Tree
Temperature di spegnimento termico
