Nano Motor Controller Air to kompaktowy moduł z wyjściami prądu stałego, sterowany za pomocą technologii radiowej Loxone Air.
Konfigurowalne wyjścia umożliwiają podłączenie silników lub lamp LED w następujących trybach pracy:
Silnik dwukierunkowy:Wyjście dla silników prądu stałego, zawierające sterowanie kierunkiem i prędkością.
Silnik jednokierunkowy: Dwa wyjścia dla silników prądu stałego, w tym sterowanie prędkością, Brak możliwości zmiany kierunku.
Ściemniacz:Wyjście do ściemniania niskonapięciowych lamp LED.

Przełączanie i zmiana polaryzacji wyjść odbywa się za pomocą wewnętrznego mostka H, prędkość silnika i ściemnianie są kontrolowane przez modulację szerokości impulsu.
Dokumentacja Nano Motor Controller Air
Spis treści
- Montaż
- Uruchomienie
- Tryby pracy
- Uwagi dotyczące pracy silników
- Ustaw aktualne wartości graniczne
- Wejścia, wyjścia, właściwości
- Uwagi dotyczące bezpieczeństwa
- Dokumenty
Montaż↑
Zainstaluj urządzenie w odpowiedniej skrzynce instalacyjnej.
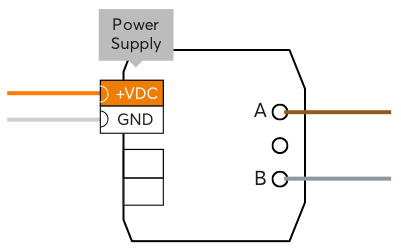
Podłącz zasilanie (zacisk śrubowy pomarańczowy/biały).
Poziom napięcia zasilania zależy od obciążenia, ale musi mieścić się w zakresie 9 ... 26VDC.
Wyjścia są podłączane w zależności od wybranego trybu pracy .
Uruchomienie↑
W stanie dostawy tryb parowania będzie aktywny po podłączeniu zasilania. Jest to sygnalizowane miganiem diody LED stanu na czerwono/zielono/pomarańczowo.
Następnie wykonaj procedurę parowania w interfejsie Air.
Jeśli chcesz ręcznie aktywować tryb uczenia się, najpierw odłącz urządzenie od zasilania na 10 sekund, a następnie włącz je ponownie. Jeśli nie można nawiązać połączenia z Miniserverem przez dwie minuty, tryb uczenia się zostaje aktywowany na 30 minut.
Tryby pracy↑
Nano Motor Controller obsługuje trzy tryby pracy, które można ustawić w Loxone Config, różniące się funkcją i sposobem podłączania wyjść:
Silnik dwukierunkowy
W tym trybie pracy dostępne jest wyjście dla silników prądu stałego, w tym sterowanie kierunkiem i prędkością.
Kierunek ruchu może być przełączany podczas pracy przez Nano Motor Controller poprzez odwrócenie polaryzacji wyjść:
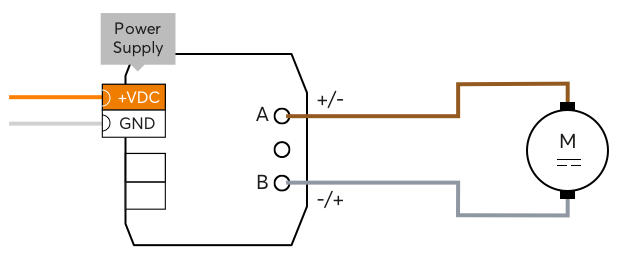
Jest to odpowiednie do zastosowań, w których konieczna jest zmiana kierunku, na przykład do napędów rolet, zasłon lub okien z napędem.
Silnik jednokierunkowy
W tym trybie pracy dostępne są dwa wyjścia dla silników prądu stałego, w tym sterowanie prędkością; wyjścia mogą być sterowane niezależnie od siebie.
Kierunek ruchu jest określany podczas podłączania:
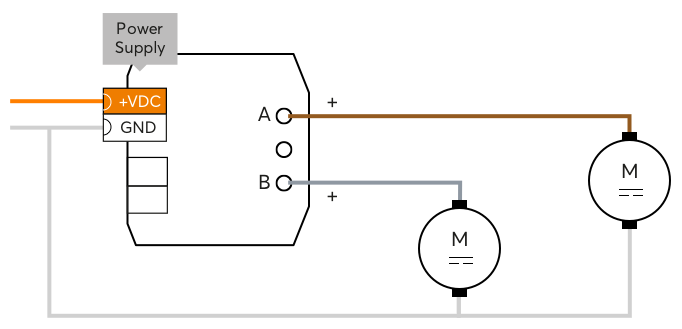
Takie sterowanie jest odpowiednie do zastosowań, w których dwa silniki mają być sterowane oddzielnie.
Dimmer
W tym trybie pracy dostępne jest wyjście do ściemniania niskonapięciowych lamp LED:
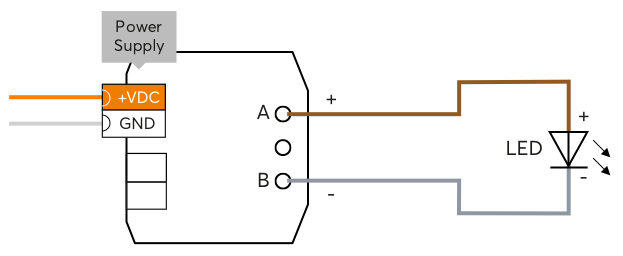
Odpowiednie zastosowanie dla źródeł światła, takich jak taśmy LED lub reflektory, które są zasilane stałym napięciem np. 12 V lub 24 V i mogą być ściemniane przez modulację szerokości impulsu (PWM).
Uwagi dotyczące pracy silników↑
Prędkość i kierunek obrotów silników są kontrolowane bezpośrednio przez ich napięcie zasilania.
Napięcie jest modulowane szerokością impulsu na wyjściach Nano Motor Controller, a w trybie dwukierunkowym polaryzacja jest również odwrócona.
Szczególnie nadają się silniki prądu stałego z komutatorem i szczotkami.
W przypadkubezszczotkowych silników DC(bezszczotkowych DC), rzeczywisty silnik jest poprzedzony elektroniką, która często uniemożliwia sterowanie prędkością PWM poprzez napięcie zasilania.
Takie silniki mogą być tylko włączane lub wyłączane. Aby to zrobić, wybierz 100% jako prędkość, wartość przyspieszenia można ustawić na skok.
Odwrócenie kierunku obrotów często nie jest możliwe, a także istnieje ryzyko uszkodzenia elektroniki silnika jeśli nie nadaje się do zmiany kierunku i nie ma zabezpieczenia przed odwrotną polaryzacją.
Równoległe połączenie silników na wyjściu jest możliwe tylko z zastrzeżeniami.
W tym celu należy upewnić się, że używane są tylko silniki tego samego typu i że są one równo obciążone.
Wyłączenie nadprądowe sterownika Nano Motor Controller może zadziałać pomimo wysokiej wartości limitu nadprądowego, gdy silniki o wysokim momencie bezwładności uruchamiają się lub zwalniają (hamują).
Można tego uniknąć, zmniejszając wartość dla przyspieszania i hamowania do np. 20%/s w celu zmniejszenia prądu pobieranego przez silnik podczas rozruchu i zwalniania.
Podczas pierwszej sekundy rozruchu silnika, ustawiony próg nadprądowy jest ignorowany i jest ustalony na 5A. Jeśli jest to zbyt krótki czas, limit przetężenia można zwiększyć do 5A, aby umożliwić działanie silników o dłuższym czasie rozruchu. Praca silników w zakresie przetężenia 2,2 - 5A jest dozwolona przez maks. 30 sekund.
W przypadkuZatrzymania silnika nie dochodzi do naturalnego zatrzymania, lecz z przyczyn technicznych jest wytwarzany efekt hamowania przez Nano Motor Controller.
Jeżeli mamy pożądane zatrzymanie bez efektu hamowania, to wartość dla hamowania musi być ustawiona na odpowiednio niższą wartość, tak aby doszło do porównywalnego zachowania jak przy naturalnym hamowaniu.
Ustaw aktualne wartości graniczne↑
Okno z diagramem do ustawiania wartości granicznych prądu można otworzyć we właściwościach kontrolera silnika Nano:

Następnie rysowany jest schemat z uwzględnieniem poboru prądu przez silnik. Jeśli występuje problem z używanym silnikiem lub przemiennikiem, wartości graniczne przepływu prądu i przetężenia można dostosować do silnika lub przemiennika.
Zaleca się, aby nie ustawiać zbyt wąskich wartości granicznych, jeśli obciążenie silnika, a tym samym prąd, zmieniają się nieco później z powodu skutków, takich jak zużycie lub wpływ temperatury.
Na koniec wartości są przenoszone na Miniserver poprzez zapisanie programu.
Czujniki↑
| Krótki opis | Opis | Zakres wartości |
|---|---|---|
| Przepływ prądu | Wejście staje się aktywne, gdy pobór prądu z silnika przekracza ustawioną wartość graniczną przepływu prądu (dwukierunkowy tryb pracy) | 0/1 |
| Przetężenie | Wejście staje się aktywne, gdy pobór prądu z silnika przekracza ustawioną wartość graniczną dla przetężenia (dwukierunkowy tryb pracy) | 0/1 |
| Przepływ prądu A | Wejście staje się aktywne, gdy pobór prądu przez silnik A jest powyżej ustawionej wartości granicznej przepływu prądu A (tryb pracy jednokierunkowej) | 0/1 |
| Przepływ prądu B | Wejście staje się aktywne, gdy pobór prądu silnika B jest wyższy od ustawionej wartości granicznej dla przepływu prądu B (tryb pracy jednokierunkowej) | 0/1 |
| Przetężenie A | Wejście staje się aktywne, gdy pobór prądu silnika A jest powyżej ustawionej wartości granicznej dla przetężenia A (jednokierunkowy tryb pracy) | 0/1 |
| Przetężenie B | Wejście staje się aktywne, gdy pobór prądu przez silnik B jest powyżej ustawionej wartości granicznej dla nadprądu B (tryb pracy jednokierunkowy) | 0/1 |
Aktory↑
| Krótki opis | Opis | Jednostka | Zakres wartości |
|---|---|---|---|
| Zgodnie ze wskazówkami zegara | Wyjście aktywuje obrót silnika w prawo A+/B- (tryb pracy dwukierunkowy) | - | 0/1 |
| Przeciwnie do ruchu wskazówek zegara | Wyjście aktywuje silnik przeciwnie do ruchu wskazówek zegara A-/B+ (dwukierunkowy tryb pracy) | - | 0/1 |
| Start/Stop A | Wyjście aktywuje silnik A (jednokierunkowy tryb pracy) | - | 0/1 |
| Start/Stop B | Wyjście aktywuje silnik B (jednokierunkowy tryb pracy) | - | 0/1 |
| Prędkość | Wyjście określa prędkość silnika (dwukierunkowy tryb pracy) Jeśli wyjście nie jest używane, obowiązuje standardowa prędkość |
% | 0...100 |
| Prędkość A | Wyjście określa prędkość silnika A (jednokierunkowy tryb pracy) Jeśli wyjście nie jest używane, obowiązuje standardowa prędkość |
% | 0...100 |
| Prędkość B | Wyjście określa prędkość silnika B (jednokierunkowy tryb pracy) Jeśli wyjście nie jest używane, obowiązuje standardowa prędkość |
% | 0...100 |
| Dimmer WW | Standardowy aktor z jednym kanałem do sterowania oświetleniem (tryb pracy ściemniacza) | % | 0...100 |
| Smart aktor WW | Smart aktor WW do sterowania oświetleniem, używać z kompatybilnymi modułami oświetleniowymi (tryb ściemniacza) | - | - |
Wejścia diagnostyczne↑
| Krótki opis | Opis | Jednostka | Zakres wartości |
|---|---|---|---|
| Status online Nano Motor Controller Air | Wskazuje, czy urządzenie jest dostępne przez Miniserver. Diagnostyka urządzeń Air Diagnostyka urządzeń Tree Diagnostyka rozszerzeń |
Cyfrowy | 0/1 |
| Temperatura systemu | Podaje wewnętrzną temperaturę urządzenia. Często jest to temperatura procesora lub innego miejsca w urządzeniu. |
° | ∞ |
| Wyłączanie od temperatury | Wejście jest aktywne, gdy wyjścia urządzenia zostały wyłączone z powodu wysokiej temperatury urządzenia. Możliwe przyczyny: Zbyt wysoka temperatura otoczenia, przeciążenie wyjść. | Cyfrowy | 0/1 |
Właściwości↑
| Krótki opis | Opis | Jednostka | Zakres wartości | Wartość standardowa |
|---|---|---|---|---|
| Monitoruj status online | If checked, you will be notified via System Status or the Mailer if the device is no longer available or goes offline. | - | - | - |
| Wyłączenie funkcji repeatera | Wyłączenie funkcji repeatera tego urządzenia Air. Loxone Air opiera się na technologii mesh. Każde urządzenie Air podłączone do zasilania może powtarzać pakiety z innych urządzeń Air, zwiększając w ten sposób zasięg i stabilność całego systemu. W dużych systemach z dużą liczbą urządzeń Air w ograniczonej przestrzeni, komunikacja między urządzeniami Air może prowadzić do bardzo wysokiego wykorzystania kanału radiowego. Nie można zagwarantować niezawodnej dostępności urządzeń radiowych. Pomocne może być wyłączenie funkcji repeatera w poszczególnych urządzeniach bezprzewodowych. Nie należy wyłączać tej funkcji lekkomyślnie, ponieważ może to wpłynąć na zasięg i stabilność systemu. |
- | - | - |
| Numer seryjny | Serial number of Air device. Automatic pairing can be enabled on the Air Base. Automatic pairing can be enabled on the Airbase for a set time. |
- | - | - |
| Typ urządzenia | Typ urządzenia Air | - | - | - |
| Tryb pracy | Wskazuje tryb pracy nano kontrolera silnika Dwukierunkowy silnik: jedno wyjście dla silników prądu stałego, w tym sterowanie kierunkiem i prędkością. Silnik jednokierunkowy: dwa wyjścia dla silników prądu stałego, w tym sterowanie prędkością, bez możliwości zmiany kierunku. Ściemniacz: jedno wyjście do ściemniania niskonapięciowych lamp LED. |
- | - | - |
| Aktualne limity | Skonfiguruj ograniczenia prądu, korzystając z wykresu aktualnego natężenia prądu. | - | - | - |
| Częstotliwość PWM | Częstotliwość modulacji szerokości impulsu. Służy do dostosowania do silnika. Na przykład można wyeliminować nieprzyjemne gwizdy. | Hz | 1000...10000 | 5000 |
| Aktualna wartość graniczna przepływu | Na podstawie tej wartości rozpoznawany jest przepływ prądu. | mA | 100...5000 | 100 |
| Wartość graniczna nadprądu | Po przekroczeniu tej wartości wykrywany jest prąd przetężeniowy, wyjście wyłącza się, a wejście nadprądowe zostaje aktywowane. Podczas pierwszej sekundy rozruchu silnika ustawiony próg przetężenia jest ignorowany i wynosi 5A. Praca silników w zakresie przetężenia 2,2 - 5A jest dozwolona przez maks. 30 sekund. (Rozruch silnika) Prąd całkowity jest istotny. |
mA | 100...5000 | 3500 |
| Przyśpieszanie | Szybkość zmian przy włączaniu. Skok oznacza, że wartość docelowa jest ustawiana natychmiast. |
- | - | - |
| Hamowanie | Szybkość zmian podczas hamowania. Skok oznacza, że wartość docelowa jest ustawiana natychmiast. |
- | - | - |
| Standardowa prędkość | Prędkość domyślna, jeśli wyjście prędkości nie jest używane. | % | 0...100 | 100 |
Uwagi dotyczące bezpieczeństwa↑
Instalacja musi być wykonana przez wykwalifikowanego elektryka zgodnie z odpowiednimi przepisami.
Instalacja wymaga montażu w odpowiedniej obudowie zapewniającej ochronę przed kontaktem, wodą i zabrudzeniami.
Dokumenty↑
Dokumentacja Nano Motor Controller Air
Temperatury wyłączenia termicznego